空中防撞系统
MQ-4C无人机在研制过程中最具挑战性的要求之一是无人机必须具备在可控空域外安全飞行的能力。按照最初签订的合同,ITT Exelis公司将为MQ-4C无人机提供一种空对空雷达子系统――机载感知与规避(ABSAA)雷达,也被形象地称为“预先关注”(Due Regard)雷达。这种雷达能够使无人机完全满足国际民用航空组织的要求,即军用和他国飞机在国际水域上空飞行时,都应该“预先关注”民用飞机的安全。
ABSAA雷达安装在无人机的鼻锥后面、卫星通信天线的前方,采用一种三面薄瓦式的有源电子扫描阵列,工作于Ku波段,探测距离大约为14~18千米,水平视场达到220度,俯仰视场达到60度。MQ-4C无人机飞行期间,该雷达将向地面站提供信息,由操作员及时发出指令,让无人机远离可能发生碰撞的空域;未来,具备自主飞行能力的无人机将基于ABSAA雷达的数据,自行改变飞行路径。
遗憾的是,由于技术问题和成本超支,美国海军在2013年6月终止了ABSAA项目,并专门成立了一个专家组,以评估如何替代这一子系统。时隔三年多后,美国海军在2016年11月宣布,将在MQ-4C无人机上安装下一代空中防撞系统。
目前,诺格公司已经到一份价值不费的合同,将机载防撞系统X(ACAS X)的自动响应模块(ARM)安装进MQ-4C无人机的航空电子系统中,主要用于测试和保障相关软件,确保无人机的特有功能。这种技术有助于保持MQ-4C无人机安全地与民用和军用飞机保持一定距离,减少飞行中发生碰撞的风险。
ACAS X由美国麻省理工学院林肯实验室研制,可以探测和跟踪其他飞机,评估潜在的碰撞风险,及时发出提醒,以阻止空中相撞。该系统以每秒一次的频率提取和处理监视数据,针对每一架目标飞机来确定最佳的行动。
ACAS X可以跟踪不同飞行模式的平台,从而允许相对于其他飞机更近距离地飞行,同时保持各种安全协议。据林肯实验室介绍,先进的跟踪算法不仅采用概率模型来代表飞行员无回应、监管过失等各种不确定性,并且通过计算机优化算法,全面考虑到由系统专家和操作用户定义的安全和使用的目标。
ACAS X通过四种具有互操作的型别,为具备不同操作能力和飞行性能的飞机提供了防撞保护。其中,ACAS Xu专门优化用于无人机系统,小写的u代表了“无人驾驶”(unmanned)的意思。
2015年初,MQ-4C无人机在安装了综合多功能能力(IFC)2.2软件后,正式开始传感器系统的飞行试验。该软件将把诺格公司多功能有源相控阵雷达和雷神公司的多频谱目标截获系统、电子支援措施、自动识别系统集成为一体,从而具有足够的功能性,以满足美国国防部规定的“里程碑C”要求,为正式投入生产做好准备。
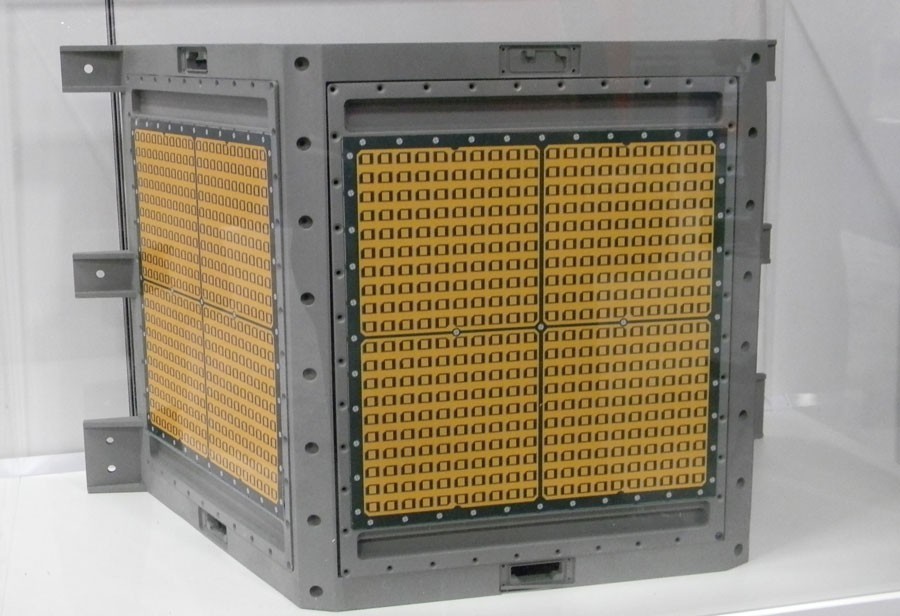
ITT Exelis公司研制的ABSAA雷达无法满足性能要求

林肯实验室研制的ACAS X主要用于有人驾驶飞机
转载请注明:北纬40° » 海神信使:全方位解密MQ-4C无人机



